







Allgemeines
Die XC-Serie verfügt über einen für so kleine Steuerungen sehr vielseitigen und komfortabel zu parametrierenden PID-Befehl mit Autotuning-Funktion. Der Befehl kann im Editor direkt eingegeben werden oder über das Befehlsmenü oben parametriert und hinzugefügt werden. Manuell hinzugefügt ist die Syntax folgende:
PID Sollwert SV (Word) Messwert PV (Word) Parameter (Word, 43 Words lang!) Ausgang (Word / Bit)
Sollwert kann eine Konstante (K/H) oder ein Register (D) sein, Messwert ein Analogeingang (ID) oder ein Register (D) und Ausgang kann ein Register (D), ein Analogausgang (QD) oder ein Bit (z.B. Y, M etc) sein. Für die Parametrierung muss ein Register D für den Startbereich des 43 Words langen Parameterbereichs angegeben werden. Vorsicht, dass andere Anweisungen hier nicht versehentlich hineinschreiben. Die Lage der einzelnen Parameter ist im Handbuch in Kapitel 8 beschrieben, die Parameter werden weiter unten kurz erläutert.
Tipp: Es empfiehlt sich dringend, die Parameter eines PID-Blocks in den batteriegepufferten Bereich zu legen. Alternativ kann man die entsprechenden Register auch beim ersten Scan aus Flash-Registern (FD) initialisieren. Der Befehl selbst ist also schnell hinzugefügt. Die Parametrierung kann entweder über die entsprechenden Register vorgenommen werden oder über die Parametrierungsmaske des Blocks im Funktionsmenü oben. Einfach mit dem Cursor auf den entsprechenden Block gehen und den PID-Button auswählen. Ein Menü erscheint:
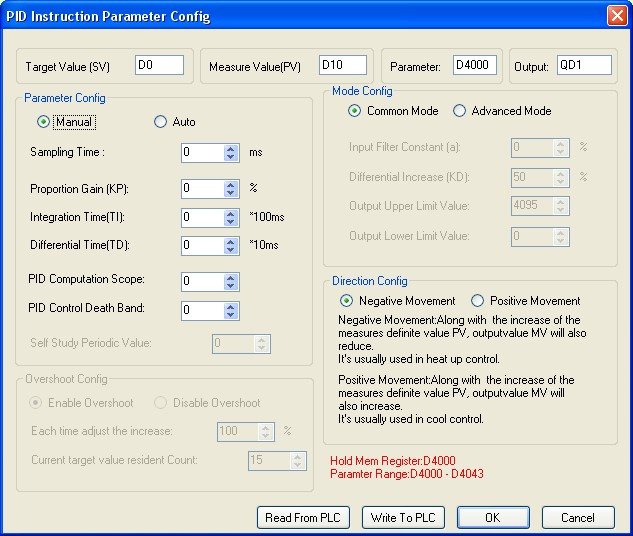
Unten rechts findet ihr noch einmal den Hinweis, dass die Parameter 43 Register verwenden. Wichtig: Über Read From PLC und Write To PLC können die aktuellen Parameter ausgelesen oder geschrieben werden.
Die Parameter kurz erklärt
Auto / Manual
Aktiviert oder deaktiviert Auto-Tuning der Parameter KP, TI und TD.
Sampling Period
Die Zykluszeit des Reglers in ms (ein 32 Bit unsigned integer wird übergeben). Das Handbuch empfiehlt ein 100 bis 1000-faches Vielfaches der Zykluszeit.
KP, TI und TD
Die Regelkoeffizienten. Wenn Auto-Tune aktiviert ist, können sie nicht verändert werden.
PID Computation Scope
Der Bereich (absolut), in dem geregelt wird. Bei einem Sollwert von 100 und einem Regelbereich von 10 ist der Regler nur im Bereich 90 bis 110 aktiv. Außerhalb von 90 bzw. 110 ist der Ausgang komplett geöffnet oder geschlossen.
PID Control Death Band
Ein Totband (absolut), innerhalb dessen der Regelausgang nicht geändert wird. Ist das Totband 3, reagiert der Regler erst bei einer Änderung von mehr als 3 mit einer Änderung des Ausgangs.
Self-Study Periodic Value
???
Enable / Disable Overshoot
Dieser Parameter ist nur im Auto-Tune-Modus verfügbar. Auf Disabled verhindert er, dass der Messwert während des Tunings über den Sollwert hinausschießt. Das ist vor allem für Regelungen relevant, wo ein zu hoher Wert unsicher ist, wie z.B. Druck.
Each Time Adjust Increase
Ein auf den ersten Blick sehr kryptischer Parameter. Ist nur aktiv, wenn Überschwingen verhindert werden soll. Angabe in %. Um Überschwingen zu verhindern, tastet sich der Regler über temporär niedrigere Sollwerte an den eigentlichen Sollwert heran. Bei 80% setzt der Regler also einen temporären Sollwert bei 80% der verbleibenden Abweichung. Bei einem Messwert von 0 und einem Sollwert von 100 setzt er also einen temporären Sollwert bei 80. Je niedriger dieser Wert, desto langsamer die Regelung, aber desto weniger überschwingt der Messwert.
Current Value Resident Count
Ähnlich kryptische Benennung. Legt fest, wie lange temporär niedrigere Sollwerte aktiv bleiben sollen. Je höher dieser Wert, desto langsamer reagiert der Regler aber desto weniger überschwingt er.
Advanced Mode
Im Advanced Mode können weitere Einstellungen vorgenommen werden: Eingangsfilter (in %), KD (in %), Maximalwert des Ausgangs (voreingestellt ist 4095, entspricht der 12 Bit Auflösung der Analogausgänge), Minimalwert des Ausgangs (voreingestellt ist 0)
Direction Config
Diese Einstellung ist nicht verfügbar, wenn Auto-Tuning aktiv ist. Negative Movement bedeutet: wenn sich der Messwert erhöht, verringert sich der Ausgangswert (Heizung). Positive Movement bedeutet: wenn sich der Messwert erhöht, erhöht sich auch der Ausgangswert (Kühlung).
Damit sollten sich einfache Regelungen leicht umsetzen lassen.
